坐标变换(6)—齐次变换矩阵
发布时间:2024-09-18
在机器人学中,齐次变换矩阵是一个至关重要的概念。它不仅简化了机器人的运动学计算,还为描述和分析机器人的运动提供了强大的工具。让我们深入探讨齐次变换矩阵在机器人正运动学中的应用,以及它如何简化复杂的坐标变换问题。
齐次变换矩阵的引入源于一个简单但深刻的想法:将旋转和平移操作统一到一个4x4的矩阵中。这个矩阵可以表示为:
其中R是3x3的旋转矩阵,t是3x1的平移向量,而最后一行[0 0 0 1]确保了矩阵的齐次性。这种表示方法的妙处在于,它允许我们将旋转和平移操作同时应用于一个点,而无需分开处理。
齐次变换矩阵的威力在于它提供了三种不同的解读方式,每一种都为我们理解机器人的运动提供了独特的视角:
-
坐标系表示:齐次变换矩阵可以用来表示一个坐标系。例如,矩阵T_AB可以表示坐标系B在坐标系A中的位置和姿态。这种解读方式让我们能够直观地理解两个坐标系之间的关系。
-
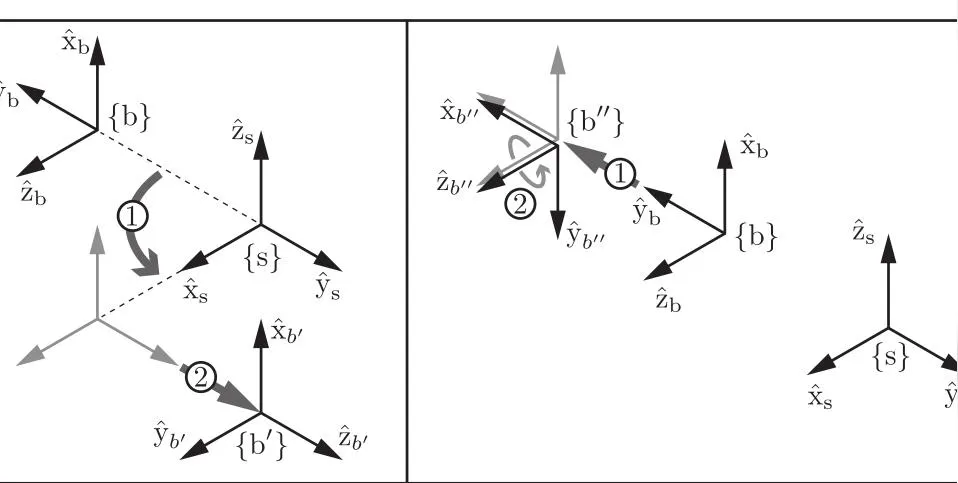
坐标系变换:齐次变换矩阵可以描述一个坐标系如何通过平移和旋转变换到另一个坐标系。例如,T_AB可以描述如何通过一系列平移和旋转操作,使坐标系A变换到与坐标系B重合。这种解读方式特别适用于描述机器人的关节运动。
-
点的操作算子:齐次变换矩阵可以用来对同一个坐标系内的点进行平移和旋转操作。这意味着我们可以用一个简单的矩阵乘法,将一个点从一个位置和姿态变换到另一个位置和姿态。这种解读方式在计算机器人末端执行器的位置时非常有用。
在机器人正运动学中,齐次变换矩阵的应用尤为突出。正运动学问题的核心是:给定一组关节角度,计算机器人末端执行器的位置和姿态。使用齐次变换矩阵,我们可以将这个问题简化为一系列矩阵乘法。
例如,考虑一个简单的两关节机器人臂。假设关节1绕x轴旋转θ1,关节2绕y轴旋转θ2。我们可以分别写出两个关节的齐次变换矩阵T1和T2,然后将它们相乘得到末端执行器相对于基座的变换矩阵T:
T = T2 * T1
这个简单的矩阵乘法就完成了复杂的坐标变换,直接给出了末端执行器的位置和姿态。这种方法不仅计算效率高,而且易于理解和编程实现。
齐次变换矩阵的另一个优点是它能够优雅地处理多重变换。在机器人学中,我们经常需要描述一系列连续的旋转和平移。使用齐次变换矩阵,我们可以将这些变换串联起来,通过简单的矩阵乘法来计算最终的结果。这种简洁的表示方法大大简化了运动学分析和控制算法的开发。
然而,齐次变换矩阵的应用并不止步于正运动学。它在逆运动学、动力学分析,甚至是视觉伺服控制中都扮演着关键角色。正是这种通用性和灵活性,使得齐次变换矩阵成为机器人学中不可或缺的工具。
总的来说,齐次变换矩阵为机器人学提供了一个强大而统一的框架,用于描述和计算机器人的运动。它不仅简化了复杂的坐标变换问题,还为机器人设计和控制算法的开发提供了坚实的数学基础。随着机器人技术的不断发展,齐次变换矩阵的重要性只会越来越凸显,继续推动着这一领域的创新和发展。