[西门子PLC] 如何使用S7-1200 PLC控制V90伺服实现精确定位
发布时间:2024-09-15
西门子S7-1200 PLC与V90伺服系统的协同工作,为实现高精度定位控制提供了强大的技术支持。通过PROFINET实时通信,这两种设备可以紧密配合,满足各种工业自动化应用的需求。本文将详细介绍三种实现精确定位控制的方法,并分析它们的优缺点。
S7-1200与V90伺服系统通信方式
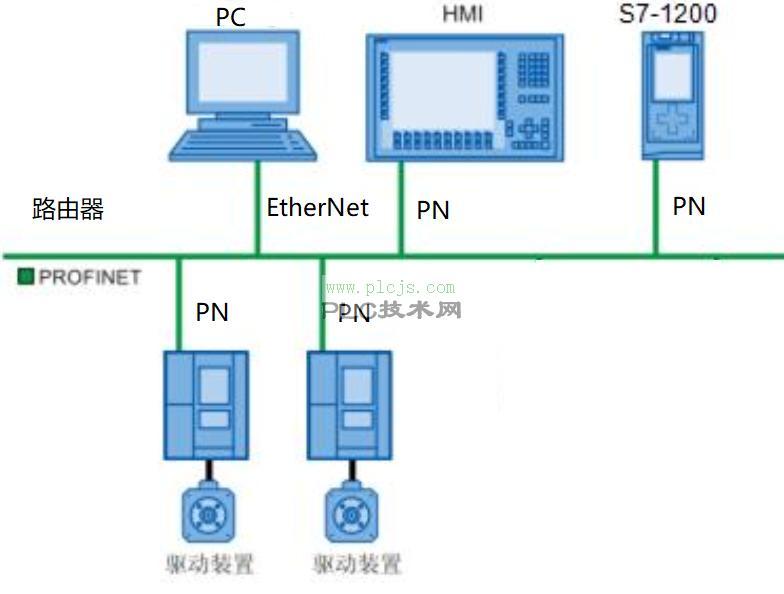
S7-1200 PLC与V90伺服系统之间的通信主要基于PROFINET实时(RT)协议。 PROFINET RT是一种基于以太网的实时通信协议,能够满足工业自动化应用中对实时性和可靠性的要求。在实际应用中,S7-1200作为IO控制器,负责整个系统的控制;V90伺服系统作为IO设备,通过PROFINET与PLC进行数据交换。
三种精确定位控制方法详解
方法一: 使用标准报文3和工艺对象
这种方法属于中央控制方式,位置控制在PLC中计算,驱动执行速度控制。具体步骤如下:
- 在PLC中组态位置轴工艺对象。
- V90使用标准报文3进行通信。
- 使用MC_Power、MC_MoveAbsolute等PLC Open标准程序块进行控制。
配置要点:
- V90设置控制模式为“速度控制(S)”。
- 配置通信报文为标准报文3。
方法二: 使用西门子报文111和FB284(SINA_POS)
这种方法属于分布控制方式,位置控制在驱动器中计算。具体步骤如下:
- PLC与V90 PN的项目配置与方法一中的步骤1-3相同。
- 在V90 PN的设备视图中插入西门子报文111。
- 在OB1中使用FB284(SINA_POS)功能块进行位置控制。
配置要点:
- V90设置控制模式为“基本定位器控制(EPOS)”。
- 配置通信报文为西门子报文111。
方法三: 使用西门子报文111和FB38002(Easy_SINA_Pos)
这种方法是FB284功能块的简化版,功能较少但使用更简便。具体步骤与方法二类似,只是使用了FB38002功能块。
三种方法优缺点对比
|
方法
|
优点
|
缺点
|
|---|---|---|
|
方法一
|
控制精度高,灵活性强
|
实现复杂,编程工作量大
|
|
方法二
|
分布式控制,响应速度快
|
需要安装额外的驱动库
|
|
方法三
|
简化版,易于使用
|
功能较少,适用范围有限
|
选择合适控制方法的考虑因素
在实际应用中,选择合适的控制方法需要考虑多个因素:
- 控制精度要求:对于极高精度的应用,方法一可能是更好的选择。
- 系统响应速度:如果对实时性有较高要求,可以考虑方法二。
- 编程复杂度:如果希望简化编程工作,可以使用方法三。
- 额外资源:方法二需要安装额外的驱动库,这可能会影响系统资源的占用。
总之,S7-1200 PLC与V90伺服系统的协同工作为实现精确定位控制提供了多种选择。工程师可以根据具体的应用需求和资源限制,选择最适合的控制方法,以达到最佳的控制效果。