苏黎世联邦理工学院新作!基于相机-Radar融合的3D目标检测和跟踪
发布时间:2024-09-18
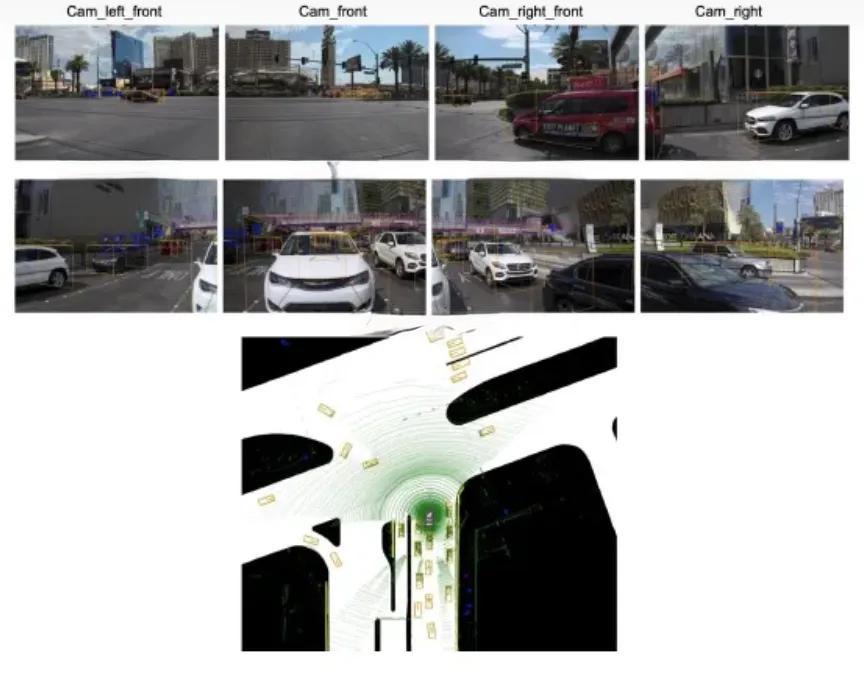
苏黎世联邦理工学院的研究团队近日提出了一种名为CR3DT的新型3D目标检测和跟踪方法,该方法通过融合相机和雷达数据,在保证高性能的同时显著降低了成本,为自动驾驶系统提供了一种极具吸引力的感知方案。
CR3DT模型的核心创新在于其独特的传感器融合架构。该模型在BEVDet架构的基础上,将雷达数据与图像数据在鸟瞰图(BEV)空间中进行融合。具体而言,雷达数据以柱状体形式编码,并与图像特征在BEV空间中连接,然后送入BEV编码层。此外,模型还在BEV编码层后添加了一个残差连接,进一步提高了特征表示能力。
在跟踪架构方面,CR3DT基于CC-3DT模型进行了改进。它在数据关联步骤中利用了检测器改进的定位和速度估计,并通过卡尔曼滤波器预测速度,结合检测器输出的速度估计,生成跟踪结果。这种改进显著减少了ID Switches,提高了跟踪的准确性。
实验结果表明,CR3DT模型在nuScenes数据集上取得了优异的性能。与仅使用相机的BEVDet基准模型相比,CR3DT在平均精度(mAP)上提高了5.3%,在平均多目标跟踪精度(AMOTA)上提高了14.9%。这表明,通过融合雷达数据,CR3DT能够显著提升3D目标检测和跟踪的性能。
CR3DT方法的另一个重要优势是其成本效益。与昂贵的激光雷达(LiDAR)系统相比,基于相机和雷达的方案具有明显的价格优势。这使得CR3DT成为自动驾驶系统中一个极具吸引力的选择,特别是在成本敏感的应用场景中。
然而,CR3DT方法也面临着一些挑战。例如,如何进一步提高在恶劣天气条件下的鲁棒性,以及如何优化模型的实时性能,这些都是未来研究需要解决的问题。
CR3DT的研究成果代表了3D感知技术的一个重要发展方向。随着自动驾驶技术的快速发展,高效、低成本、高精度的3D感知方案将成为行业关注的焦点。CR3DT通过创新的传感器融合方法,在性能和成本之间找到了一个理想的平衡点,为自动驾驶系统的感知模块提供了一个新的设计思路。
总的来说,苏黎世联邦理工学院的这项研究为3D目标检测和跟踪领域带来了新的突破。它不仅展示了相机-Radar融合的巨大潜力,也为自动驾驶技术的发展提供了新的可能性。随着相关技术的不断进步,我们有理由相信,未来的自动驾驶系统将能够以更低的成本实现更安全、更高效的运行。