三种智能汽车上最常见的传感器
发布时间:2024-09-18
智能汽车的“眼睛”:三种关键传感器如何协同工作
在智能汽车的感知系统中,摄像头、雷达和激光雷达扮演着至关重要的角色。这三种传感器就像是智能汽车的“眼睛”,帮助车辆“看到”周围环境,实现安全、高效的自动驾驶。
摄像头为智能汽车提供视觉信息
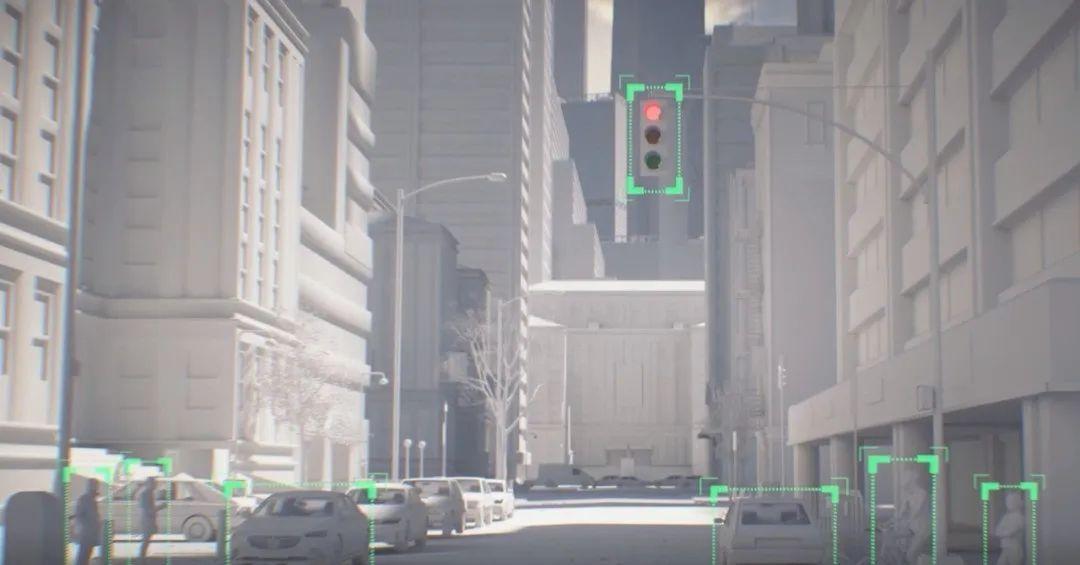
摄像头是智能汽车中最常见的传感器之一 ,它就像是车辆的“眼睛”,能够捕捉周围环境的视觉信息。通过图像处理和计算机视觉技术,摄像头可以识别交通标志、信号灯、行人和车辆等目标。根据安装位置的不同,摄像头可以分为前视、后视、环视、侧视和内视等多种类型。
前视摄像头是ADAS(高级驾驶辅助系统)的核心组成部分,可以实现前向碰撞预警、车道偏离预警等功能。例如,特斯拉Model 3配备了三个前视摄像头,分别负责不同距离的监测。环视摄像头则可以提供车辆周围的360度全景图像,帮助驾驶员或自动驾驶系统全面了解周围环境。
雷达系统助力智能汽车实现全天候感知
雷达系统(包括毫米波雷达和超声波雷达)是智能汽车的另一双“眼睛” ,它们通过发射和接收电磁波或声波来探测周围物体的距离和速度。雷达系统的优势在于它们不受光线条件的影响,能够在各种天气条件下稳定工作。
毫米波雷达通常用于中远距离探测,可以实现自适应巡航控制、自动紧急制动等功能。超声波雷达则主要用于短距离探测,特别是在泊车辅助系统中发挥重要作用。例如,宝马最新的i系列和7系列已经支持使用车钥匙遥控汽车自动泊车,这一功能就离不开超声波雷达的精准探测。
激光雷达提供高精度三维环境信息
激光雷达(LiDAR)是智能汽车感知系统中的“超级眼睛” 。它通过发射激光束并测量反射信号来获取物体的距离和位置信息,可以生成高精度的三维点云数据。这些数据可以用来构建周围环境的三维模型,帮助自动驾驶系统更准确地识别和定位道路上的车辆、行人、障碍物等。
激光雷达的优势在于其高分辨率和高精度,但成本相对较高。随着技术的进步和规模效应的显现,激光雷达的成本正在逐步降低,这将推动其在智能汽车中的广泛应用。
多传感器融合提升智能汽车感知能力
在实际应用中, 这三种传感器并不是孤立工作的 。相反,它们需要协同配合,通过多传感器融合技术来提供更全面、更准确的环境感知信息。例如,摄像头可以提供丰富的视觉信息,但可能在恶劣天气条件下表现不佳;雷达系统则可以在各种天气条件下稳定工作,但可能无法识别物体的细节;激光雷达可以提供高精度的三维信息,但成本较高。
通过将这些传感器的数据进行融合,智能汽车可以获得更全面、更可靠的环境感知能力。这种多传感器融合技术是实现高级别自动驾驶的关键所在。
随着智能汽车技术的不断发展,这三种关键传感器将会变得更加先进和智能。它们将继续发挥“眼睛”的作用,帮助智能汽车更好地“看”清周围环境,实现更安全、更高效的自动驾驶。