MPS|齐次变换矩阵dh法的意义是什么?
发布时间:2024-09-03
在机械臂设计和运动学分析中,齐次变换矩阵和DH法(Denavit-Hartenberg方法)是两个密切相关的概念,它们共同构成了描述和分析机械臂运动的基础。然而,MPS(主生产计划)与这两个概念并无直接关联,因此我们将分别解释MPS、齐次变换矩阵和DH法,最后重点阐述齐次变换矩阵DH法的意义。
MPS(主生产计划)是生产计划工作的重要内容,用于确定每一具体的最终产品在每一具体时间段内生产数量的计划。它根据销售计划、未完成订单、可用物料的数量、现有能力、管理方针和目标等信息,将经营计划或生产大纲中的产品系列具体化,起到了从综合计划向具体计划过渡的承上启下作用。
齐次变换矩阵是一种数学工具,用于描述和计算空间中物体的位置和姿态变化。在机器人学中,它被用来表示机械臂末端执行器相对于基座坐标系的位置和姿态。齐次变换矩阵通常是一个4x4的矩阵,包含了平移和旋转的信息,可以方便地进行复合运算,从而实现复杂的运动变换。
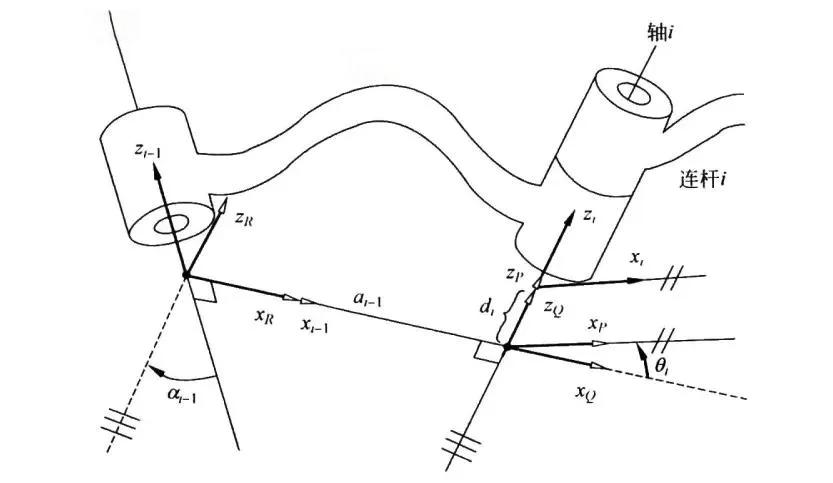
DH法是由Denavit和Hartenberg提出的,用于机器人运动学建模的一种方法。这种方法通过在机械臂的每个连杆上建立一个坐标系,然后通过齐次变换矩阵来描述相邻连杆之间的相对位置和姿态,从而建立起整个机械臂的运动学模型。DH法的核心在于确定四个参数:α(扭角)、a(连杆长度)、d(连杆偏距)和θ(连杆角度),这四个参数描述了连杆之间的相对位置和姿态。
齐次变换矩阵DH法的意义在于,它建立了一个简洁而强大的框架,用于描述和分析机械臂的运动学特性。通过DH法,我们可以:
-
建立关节物理模型和空间位置姿态之间的关系。DH参数不仅描述了相邻连杆间的相对位置,还反映了连杆自身的结构属性,从而使得机械臂的结构设计和运动学分析紧密联系。
-
方便地求解机器人的正逆运动学方程。正运动学方程是已知关节坐标求解末端笛卡尔空间坐标,逆运动学反之。DH法使得这些计算变得系统化和规范化。
-
便于修改机器人的结构以满足工作空间的要求。通过调整DH参数,可以改变机械臂的结构,从而影响其工作范围和灵活性。
-
为机器人的控制和编程提供了基础。通过DH法建立的运动学模型,可以更容易地为机器人编写控制程序,实现特定的任务。
总的来说,齐次变换矩阵DH法的意义在于它提供了一种系统化的方法,将复杂的机械臂运动学问题转化为数学模型,使得机械臂的设计、分析和控制变得可行和高效。这种方法不仅在机器人学中得到了广泛应用,也在其他需要描述和分析空间运动的领域中发挥着重要作用。