ZMP用于双足机器人稳定性分析的机器人系统的步态规划方法
发布时间:2024-09-18
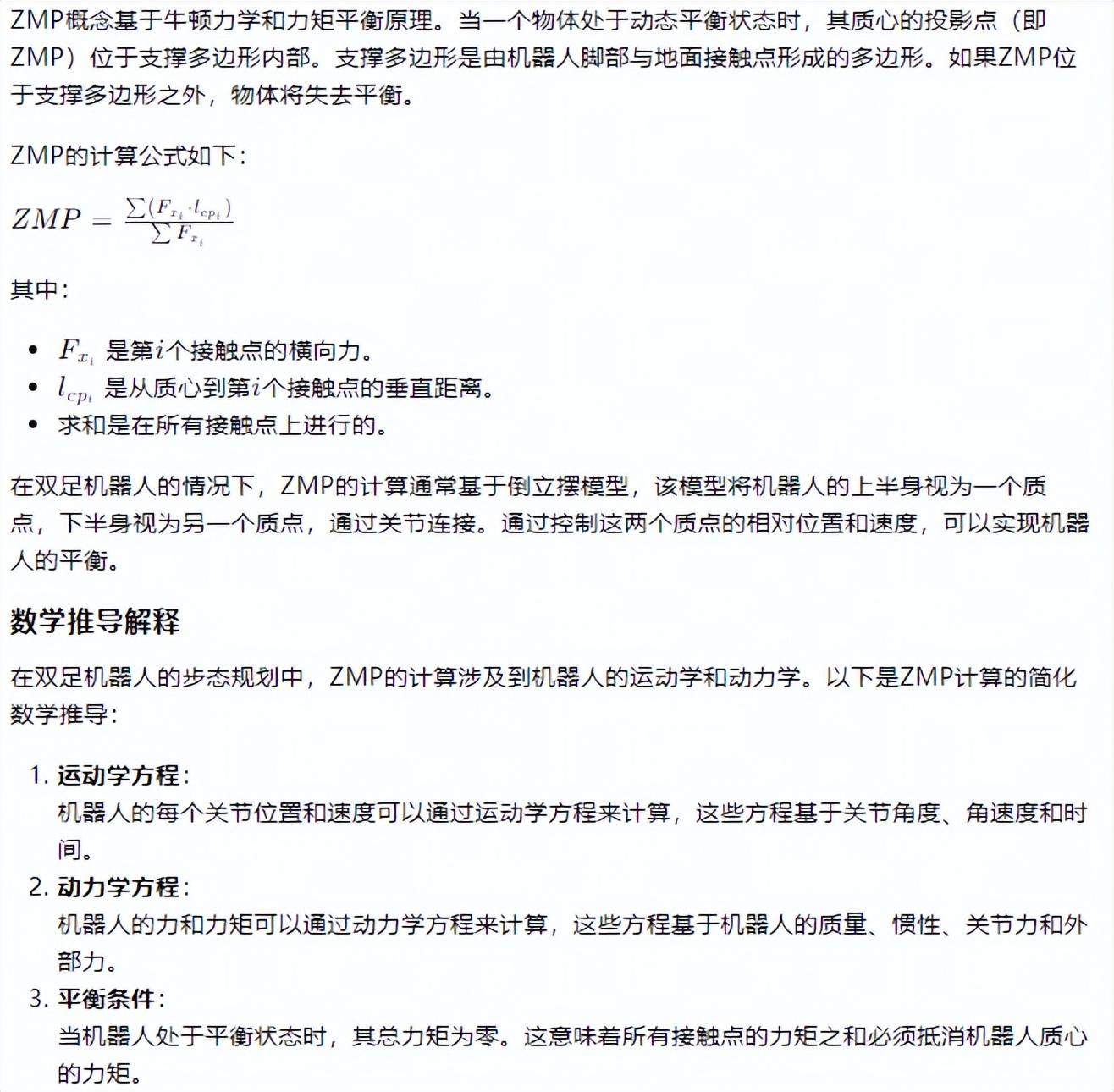
双足机器人在行走时面临着一个独特的挑战:它们没有固定的支撑点。这种不稳定性使得步态规划成为双足机器人研究中的一个关键问题。在这个领域,零力矩点(ZMP)的概念成为了确保机器人稳定行走的关键。
ZMP是一个虚拟点,位于支撑脚的接触面上,使得通过该点的地面反作用力矩为零。简单来说,如果双足机器人的质心(COM)位于ZMP上方,那么机器人就能保持平衡。因此,ZMP成为了连接机器人运动学和动力学的桥梁,是步态规划的核心。
然而,仅仅知道ZMP的位置是不够的。双足机器人需要能够预测和控制ZMP的运动,以确保在各种地形和速度下都能保持稳定。这就是预观控制算法发挥作用的地方。
预观控制算法的核心思想是“眼光放长远”。它不仅仅关注当前的ZMP位置,还会考虑未来一段时间内ZMP的运动。通过这种方式,算法可以提前规划ZMP的轨迹,确保机器人在切换支撑腿时仍然保持平衡。
例如,Kajita等人在2003年提出的一种预观控制算法中,将ZMP的系统状态方程离散化,并定义了一个评价函数来最小化伺服误差。这种方法允许控制器在每个采样时间点上,根据未来ZMP的参考量来优化当前的控制输入。
这种前瞻性规划的效果是显著的。实验表明,使用预观控制算法的双足机器人能够生成平滑的COM轨迹,并且ZMP能够精确跟踪参考轨迹。即使在复杂的步态中,如上下楼梯或避障,ZMP预观控制也能确保机器人的稳定性。
值得注意的是,ZMP预观控制算法的效果与预观时间的长度有关。较长的预观时间可以提供更好的稳定性,但过长的预观时间可能会增加计算复杂度。因此,实际应用中需要权衡预观时间的长度。
ZMP在双足机器人步态规划中的重要性不言而喻。它不仅影响机器人的稳定性,还与机器人的效率和灵活性密切相关。通过精确控制ZMP,双足机器人可以实现更高效的行走,减少能量消耗,并在复杂的环境中保持平衡。
随着人工智能和机器人技术的快速发展,ZMP控制方法也在不断演进。研究人员正在探索更先进的算法,如考虑历史ZMP误差的改进版预观控制,以进一步提高双足机器人的性能。
总的来说,ZMP是连接双足机器人运动学和动力学的关键桥梁,而预观控制算法则是确保机器人稳定行走的有力工具。随着这些技术的不断进步,我们有理由相信,未来的双足机器人将能够在各种环境中自如行走,为人类的生活和工作带来更多的便利。