解决陀螺仪角度漂移问题 三轴陀螺仪和六轴陀螺仪的区别
发布时间:2024-09-16
陀螺仪是现代电子设备中不可或缺的传感器,广泛应用于智能手机、无人机、虚拟现实等领域。然而,陀螺仪在使用过程中常常会出现角度漂移问题,这不仅影响了设备的精度,还可能导致系统故障。为了解决这一问题,工程师们开发出了多种解决方案,并不断创新陀螺仪的设计。
解决陀螺仪角度漂移问题的方法主要包括零位校准、温度补偿、算法滤波和多传感器融合等。其中,多传感器融合是一种特别有效的方法,它通过结合不同类型的传感器来提高测量精度。正是基于这一思路,六轴陀螺仪应运而生。
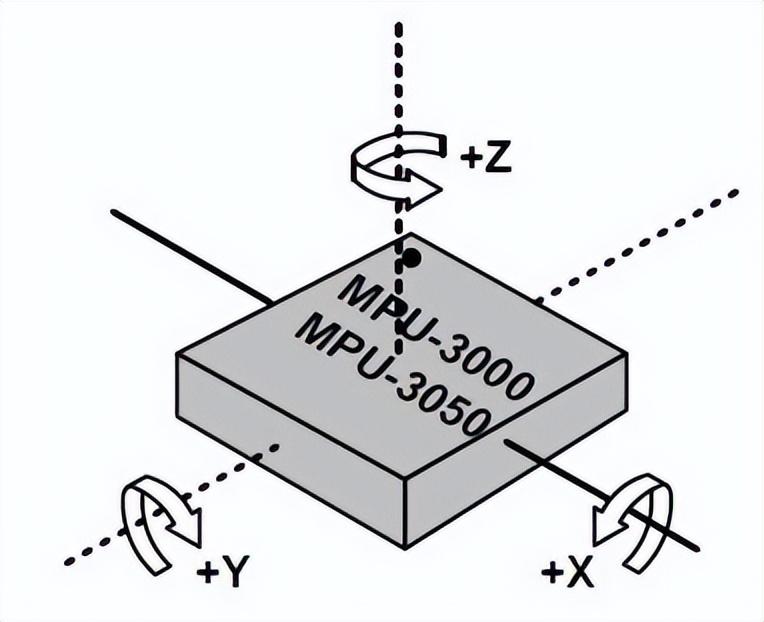
三轴陀螺仪主要用于测量物体在三维空间中的角速度,即绕X、Y、Z三个轴的旋转速度。它能够提供准确的角度变化信息,适用于姿态计算和导航应用。然而,仅依靠三轴陀螺仪往往难以完全消除角度漂移问题,特别是在长时间工作或环境条件变化较大的情况下。
相比之下,六轴陀螺仪在三轴陀螺仪的基础上增加了三轴加速度计,能够同时测量物体在三个轴向上的线性加速度。这种设计使得六轴陀螺仪能够更准确地估计物体的姿态,并通过检测线性加速度来区分静止和运动状态。加速度计的加入不仅提高了系统的精度和稳定性,还能对陀螺仪的漂移进行补偿,从而显著改善了整体性能。
六轴陀螺仪的优势主要体现在以下几个方面:
首先,它能够提供更全面的运动信息。除了角速度,还能测量加速度,这对于需要精确控制的系统尤为重要。
其次,通过融合加速度计和陀螺仪的数据,可以实现更准确的姿态估计。例如,在智能手机中,六轴陀螺仪可以帮助实现更精确的屏幕旋转功能。
再者,六轴陀螺仪能够更好地应对环境变化。温度变化是导致陀螺仪漂移的一个重要因素,而六轴陀螺仪通过多传感器融合可以更好地补偿这种影响。
然而,六轴陀螺仪的这些优势也伴随着更高的成本。由于包含了更多的传感器和更复杂的电路设计,六轴陀螺仪的价格通常高于三轴陀螺仪。此外,六轴陀螺仪在功耗和数据处理方面的要求也更高,这在某些应用中可能成为一个考虑因素。
尽管如此,在需要高精度姿态测量的应用中,六轴陀螺仪仍然是更好的选择。例如,在无人机导航、虚拟现实设备、汽车稳定控制系统等领域,六轴陀螺仪的优势得到了充分发挥。它不仅能够提供更准确的姿态信息,还能通过多传感器融合技术有效减少角度漂移,从而提高系统的整体性能和可靠性。
随着技术的不断进步,陀螺仪的设计也在不断创新。未来,我们可能会看到更多集成度更高、性能更优的多轴陀螺仪出现,为各种应用提供更精确、更可靠的运动感知能力。