基于NeRF/Gaussian三维重建的全新SLAM算法
发布时间:2024-09-02
三维重建技术正在经历一场革命。2020年,Neural Radiance Fields(NeRF)的提出为三维重建带来了新的可能性。如今,基于NeRF和Gaussian的三维重建技术正在重塑我们理解和重建三维世界的方式。
传统的三维重建方法,无论是基于深度图还是彩色图,都面临着诸多挑战。这些方法往往会产生孔洞、纹理混叠等问题,且难以处理复杂的光照条件。相比之下,NeRF和Gaussian技术能够生成更高质量、更逼真的三维模型。
NeRF的核心思想是将一个静态3D场景表示为一个连续的5D函数,输入包括3D空间位置和2D视角方向,输出则是该位置的体积密度和从给定视角看到的颜色。这种方法通过深度神经网络来近似这个函数,从而实现对复杂场景的连续高质量渲染。
Gaussian三维重建则采用了另一种思路。它使用各向异性高斯分布来表示场景中的物体,每个高斯分布由中心位置、不透明度、三维协方差矩阵和颜色等参数描述。这种方法能够在保持高保真度的同时,实现更快的渲染速度和更精细的纹理细节。
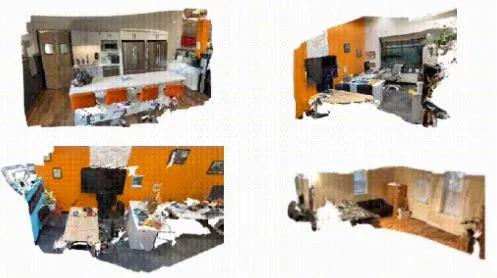
这两种技术在SLAM(Simultaneous Localization and Mapping)领域展现出巨大潜力。SLAM技术旨在让机器人、无人机等自动化系统能够在未知环境中同时进行自我定位和环境映射。传统的SLAM方法往往依赖于几何结构进行重投影,而在处理未知区域时会遇到困难。NeRF和Gaussian技术的引入,为SLAM提供了更强大的三维重建能力。
NeRF的优势在于其能够合成照片级别的新视角,重建的模型细节更加丰富。然而,原始版本的NeRF存在训练和渲染速度慢、只能表示静态场景等缺点。针对这些问题,研究者们提出了多种改进方案,如Mip-NeRF、NeRF++等,大大提升了NeRF的实用性和泛化能力。
Gaussian三维重建则在保持高质量的同时,实现了更快的渲染速度。例如,Gaussian Splatting技术可以达到400 FPS的渲染速度,远远超过NeRF的水平。此外,Gaussian方法还具有明确的空间范围和易于编辑的优点,这在SLAM应用中尤为重要。
尽管NeRF和Gaussian技术展现出巨大潜力,但它们也存在一些局限性。例如,NeRF在处理动态场景时仍面临挑战,而Gaussian方法在边缘设备上的性能还有待提高。未来,研究者们将继续探索如何结合这两种技术的优势,开发出更强大、更高效的三维重建和SLAM解决方案。
随着这些技术的不断发展,我们有理由相信,基于NeRF和Gaussian的三维重建将在自动驾驶、虚拟现实、游戏开发等多个领域发挥重要作用,为我们的生活带来革命性的变化。