卫星定位:如何达到厘米级精度?
发布时间:2024-08-29
卫星定位技术已经深入我们的日常生活,从导航到农业,再到科学研究,其应用无处不在。然而,要实现厘米级的高精度定位,仅仅依靠传统的GPS是远远不够的。那么,如何才能让卫星定位达到如此高的精度呢?
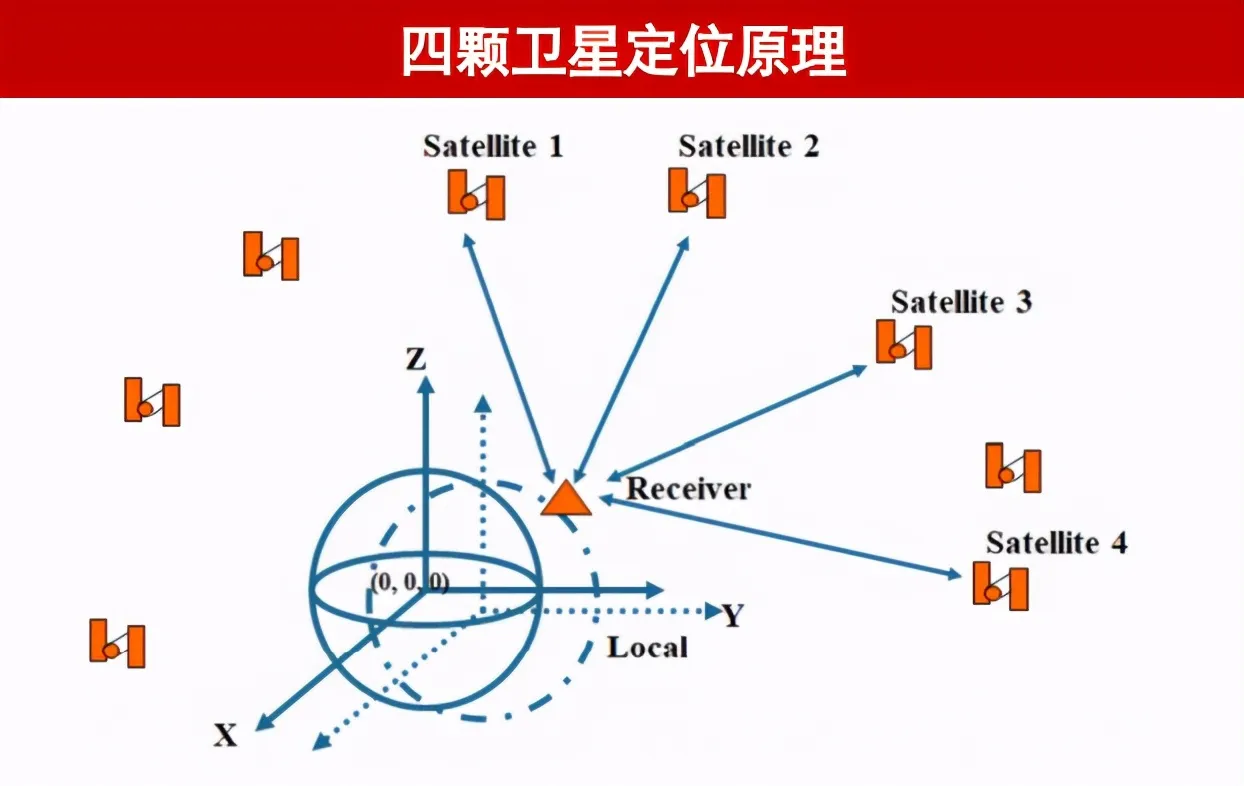
要理解这个问题,我们首先需要了解卫星定位的基本原理。以美国的全球定位系统(GPS)为例,它由24颗卫星组成,分布在6个轨道上,确保地球上任何地点都能同时观测到至少4颗卫星。GPS接收机通过测量与这些卫星之间的距离,利用三维坐标中的距离公式,可以解算出接收机的位置。理论上,只要有3颗卫星,就能组成3个方程式,解出观测点的三维坐标。但实际上,由于卫星时钟与接收机时钟之间存在误差,我们需要引入第4颗卫星,形成4个方程式进行求解,从而得到更精确的定位结果。
然而,即便有了4颗卫星,传统的GPS定位精度也只能达到100米左右。造成这种误差的原因主要有卫星运行轨道误差、卫星时钟误差、大气对流层和电离层对信号的影响,以及人为的SA保护政策(2000年5月1日已被取消)。为了提高定位精度,差分GPS(DGPS)技术应运而生。
差分GPS的核心思想是建立一个或多个基准站,这些基准站位于已知精确坐标的地点。基准站通过GPS观测,计算出自己的观测值与已知精确坐标之间的差值,即“差分修正值”。然后,基准站将这些差分修正值通过无线电信号发送给附近的GPS接收机。接收机接收到差分修正值后,将其应用于自身的观测值中,从而消除或大大减小了各种误差,显著提高了定位精度。
实验表明,利用差分GPS技术,定位精度可以提高到5米左右。但这仍然无法满足某些高精度应用的需求。为了进一步提高精度,人们开发出了实时动态差分(RTK)技术。RTK技术不仅使用差分修正值,还利用了载波相位测量技术,可以实时提供厘米级的定位精度。
RTK技术的工作原理是,基准站和用户接收机同时观测相同的GPS卫星,并测量载波相位。基准站将自身的观测值和差分修正值通过无线电信号发送给用户接收机。用户接收机接收到这些信息后,与自身的观测值进行比较,通过复杂的算法解算出厘米级的精确位置。
值得注意的是,RTK技术的高精度定位依赖于基准站和用户接收机之间的短距离通信。通常情况下,当两者之间的距离超过10公里时,定位精度会明显下降。因此,为了实现大范围内的高精度定位,需要建立密集的基准站网络。
随着技术的不断进步,卫星定位技术的精度正在不断提高。除了差分GPS和RTK技术,还有其他方法可以进一步提高定位精度,如多频段GPS、精密单点定位(PPP)等。这些技术的应用,使得卫星定位在各个领域的应用更加广泛,从自动驾驶汽车到精准农业,再到地质监测,厘米级的高精度定位正在改变我们的生活和工作方式。
卫星定位技术的发展历程告诉我们,从最初的百米级精度到如今的厘米级精度,每一次精度的提升都源于对技术的不断创新和改进。未来,随着更多卫星系统的加入(如中国的北斗系统),以及新技术的不断涌现,我们有理由相信,卫星定位的精度还将继续提高,为人类带来更多可能性。