决策规划(四),运动规划常用算法
发布时间:2024-09-18
在机器人和自动驾驶领域,运动规划是实现自主导航的关键技术之一。它涉及在给定的环境中,为机器人或车辆生成无碰撞的路径或轨迹。随着人工智能和自动驾驶技术的快速发展,运动规划算法也在不断创新和优化。本文将介绍几种常用的运动规划算法及其应用场景。
基于搜索的路径规划算法
基于搜索的路径规划算法是最基础也是最直观的一类算法。这类算法通过在状态空间中搜索,找到从起点到终点的最优路径。其中,Dijkstra算法和A*算法是最为著名的两种。
Dijkstra算法是一种广为人知的最短路径算法。它保证能找到从起点到终点的最短路径,但计算量较大。在所有边权重相同的情况下,Dijkstra算法退化为广度优先搜索算法。
A 算法可以看作是Dijkstra算法的改进版,它结合了贪心算法的思想,通过引入启发式函数来加速搜索过程。A 算法的扩展规则是f(n) = g(n) + h(n),其中g(n)是从起点到当前节点的实际成本,h(n)是估计的从当前节点到终点的成本。A*算法在保证找到最优解的同时,大大提高了搜索效率。
基于随机采样的路径规划算法
基于随机采样的路径规划算法通过在状态空间中随机采样点,构建搜索树或图来寻找路径。这类算法特别适合处理高维空间和复杂环境。
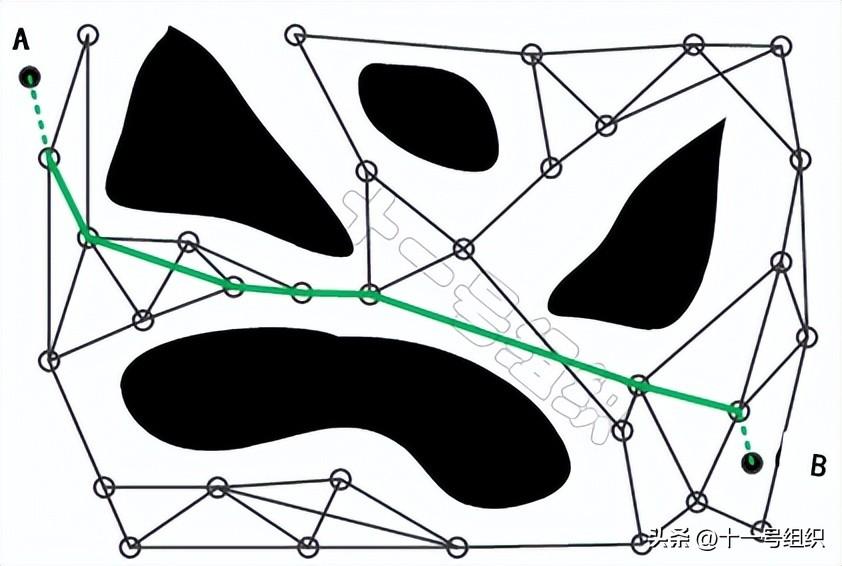
概率路线图法(PRM)是一种典型的基于随机采样的路径规划算法。它首先在状态空间中随机采样点,然后构建一个图,最后在图上使用A*或Dijkstra算法搜索最短路径。PRM算法具有概率完备性,即在存在解的情况下,随着采样点数量的增加,找到解的概率趋近于1。
快速搜索随机树法(RRT)是另一种流行的基于随机采样的算法。它通过增量构建一棵搜索树来寻找路径。RRT算法从起点开始,在状态空间中随机采样点,然后尝试将新点连接到树上。RRT算法特别适合处理高维空间和狭窄通道等复杂环境。
满足动力学约束的路径规划算法
在实际应用中,机器人或车辆的运动往往受到动力学约束。满足动力学约束的路径规划算法考虑了这些约束,生成更加平滑和可行的轨迹。
状态栅格规划器(State Lattice Planner)是一种基于采样的满足动力学约束的路径规划算法。它通过在状态空间中生成一个规则点阵,确保生成的路径满足机器人的运动学和动力学约束。状态栅格规划器可以结合A*等搜索算法来寻找最优路径。
运动规划算法面临的挑战与未来发展方向
尽管运动规划算法已经取得了显著进展,但仍面临诸多挑战。例如,在高维空间中,搜索效率和计算复杂度仍然是一个难题。此外,如何在动态环境中实时更新路径,以及如何平衡路径的最优性和计算效率,都是需要进一步研究的问题。
未来,运动规划算法的发展方向可能包括:更高效的采样策略、更精确的启发式函数设计、以及与深度学习等新技术的结合。随着自动驾驶和机器人技术的不断进步,运动规划算法将继续发挥关键作用,推动智能系统向更高水平发展。