PID控制算法
发布时间:2024-09-16
在控制理论的浩瀚星空中,有一种算法如同恒星般闪耀,它就是PID控制算法。从20世纪30年代诞生至今,PID算法不仅经受住了时间的考验,更在现代工业控制领域占据了举足轻重的地位。让我们一起追溯PID算法的发展历程,探索它如何从简单的比例控制演变为当今最广泛应用的控制算法之一。
PID算法的雏形可以追溯到20世纪30年代。当时,船舶自动舵系统首次采用了比例(P)控制的概念。这种控制方式根据系统输出与期望值之间的偏差,按一定比例调整控制量。虽然简单直观,但比例控制存在一个明显的缺陷——稳态误差。正如一个漏水的水桶,无论怎样加水,水位都无法达到设定值。
为了解决这个问题,工程师们在40年代引入了积分(I)控制。积分控制通过累积历史偏差,不断调整控制量,直到系统达到稳态。这就像给漏水的水桶不断加水,直到水位稳定在设定值。积分控制的引入大大提高了控制系统的准确性,但同时也带来了新的挑战——超调和振荡。
到了50年代,微分(D)控制的概念应运而生。微分控制通过预测偏差的变化趋势,提前调整控制量,有效抑制了超调和振荡。这就像一个熟练的司机,在接近红绿灯时提前减速,避免急刹车。至此,PID控制算法的完整框架形成,成为了一种能够兼顾快速响应和稳定性的强大控制工具。
随着计算机技术的发展,PID算法的应用范围不断扩大。从最初的船舶自动舵,到化工过程控制、汽车自动驾驶,再到航空航天领域,PID算法无处不在。在现代工业生产中,PID控制器被广泛应用于温度、压力、流量等各种物理量的控制。例如,在一个温度控制系统中,PID算法可以根据实际温度与设定值之间的偏差,精确调整加热器的功率,确保温度稳定在目标值。
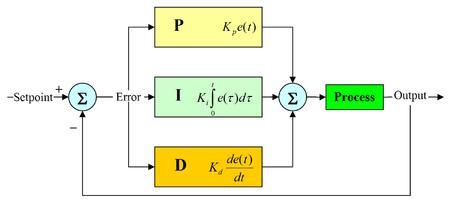
PID算法的成功源于其独特的设计。比例控制快速响应偏差,积分控制消除稳态误差,微分控制抑制超调。这种三管齐下的策略,使得PID算法能够在各种复杂的系统中实现精确控制。正如一位工程师所言:“PID算法就像是一个完美的指挥家,能够协调各种乐器,演奏出和谐的乐章。”
然而,PID算法的成功并非偶然。它凝聚了几代工程师的智慧和经验。从最初的简单公式,到如今复杂的自适应PID算法,每一次改进都源于对系统特性的深入理解和对控制效果的不懈追求。正是这种持续创新的精神,使得PID算法在近一个世纪的时间里始终保持活力。
展望未来,PID算法仍将继续发挥其重要作用。随着人工智能和机器学习技术的发展,我们有理由相信,PID算法将会与这些新技术深度融合,创造出更加智能、高效的控制方法。正如一位控制理论专家所说:“PID算法不是终点,而是控制理论发展的基石。”
从简单的比例控制到现代复杂的PID算法,我们看到的不仅是一种控制方法的演变,更是人类对精确控制不懈追求的缩影。在这个充满不确定性的世界里,PID算法为我们提供了一种可靠的方式来驾驭复杂系统,实现我们的目标。它的发展历程告诉我们,真正的创新往往源于对基础理论的深入理解和对实际需求的敏锐洞察。这或许就是PID算法能够长盛不衰的秘诀所在。