自动驾驶汽车的道路识别方法?
发布时间:2024-09-18
自动驾驶汽车正在悄然改变我们的出行方式,而这一切都始于它们如何“看懂”道路。在自动驾驶技术的复杂体系中,视觉感知技术扮演着至关重要的角色,它让汽车能够像人类驾驶员一样识别道路环境,做出安全的驾驶决策。
视觉感知技术的核心在于如何让汽车“看”到并理解周围环境。这涉及到一系列复杂的算法和技术,包括图像处理、模式识别、深度学习等。以交通标志识别为例,自动驾驶系统需要能够快速准确地识别各种交通标志,包括限速标志、禁止标志等。这不仅需要识别标志的形状和颜色,还要理解其含义,并据此调整驾驶行为。
在实际应用中,视觉感知技术通常采用“分隔”和“识别”两个步骤。首先,系统需要从复杂的场景图像中快速定位可能的交通标志区域。这通常利用交通标志的颜色和形状特征来实现。例如,红色标志通常表示禁令,蓝色标志表示指示,黄色标志表示警告。系统会根据这些特征,从图像中筛选出可能的交通标志区域。
接下来是识别阶段。系统会对筛选出的区域进行进一步分析,确定其具体类型。这通常采用机器学习算法,如支持向量机(SVM)或深度学习模型。这些模型经过大量训练数据的学习,能够准确识别各种交通标志。
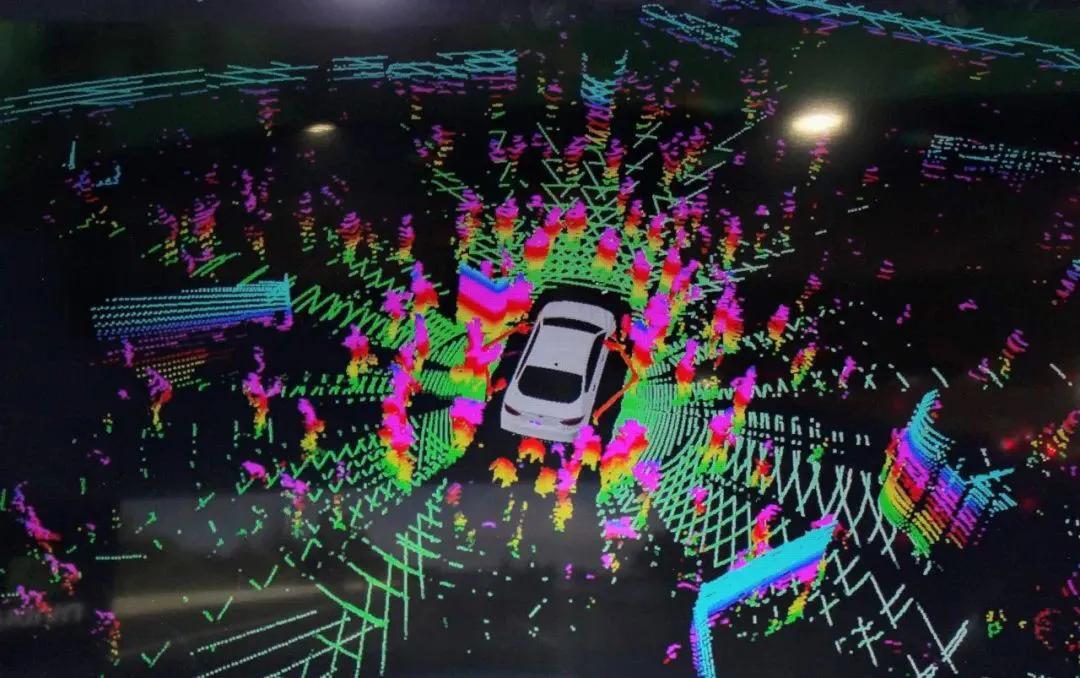
近年来,随着深度学习技术的发展,视觉感知技术取得了显著进步。深度学习模型能够自动学习图像特征,无需人工设计复杂的特征提取算法。这大大提高了识别的准确性和鲁棒性。同时,多传感器融合技术的应用,使得系统能够更好地应对复杂环境,如雨雪天气、夜间照明不足等情况。
然而,视觉感知技术仍面临诸多挑战。首先是复杂环境下的识别准确性问题。在极端天气条件下,或者当交通标志被遮挡时,系统的识别效果可能会大打折扣。其次是计算效率问题。自动驾驶系统需要在毫秒级时间内完成感知和决策,这对算法的效率提出了极高要求。此外,数据安全和隐私保护也是不容忽视的问题。
尽管如此,视觉感知技术的发展前景依然广阔。随着技术的不断进步和应用场景的拓展,我们有理由相信,未来的自动驾驶汽车将能够更加智能、安全地行驶在道路上。这不仅会改变我们的出行方式,还将深刻影响城市规划、交通管理等多个领域。
自动驾驶技术的发展,正如一场静默的革命,正在悄然改变我们的世界。而视觉感知技术,作为这场革命的先锋,正在引领我们迈向一个更加智能、安全的交通新时代。